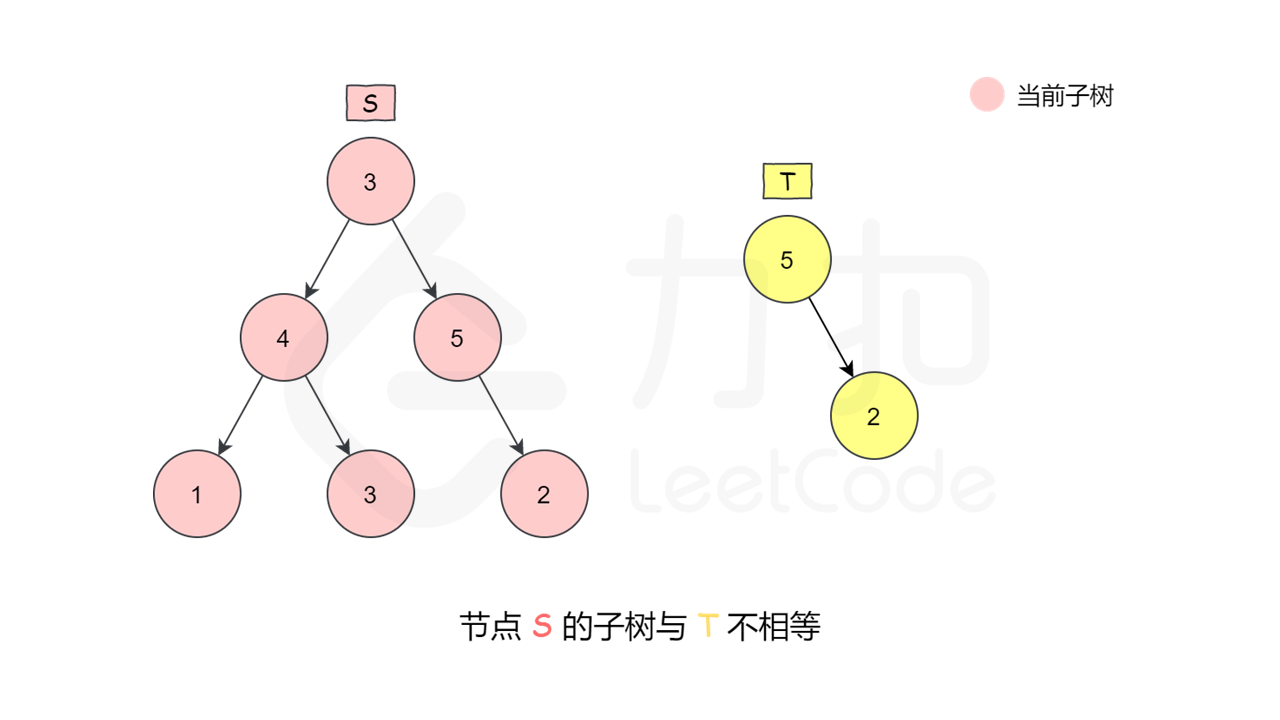
给你两棵二叉树 root 和 subRoot 。检验 root 中是否包含和 subRoot 具有相同结构和节点值的子树。如果存在,返回true ;否则,返回 false 。
二叉树 tree 的一棵子树包括 tree 的某个节点和这个节点的所有后代节点。tree 也可以看做它自身的一棵子树。
示例 1:
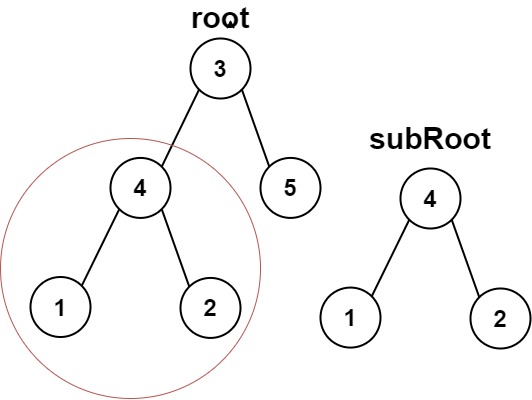
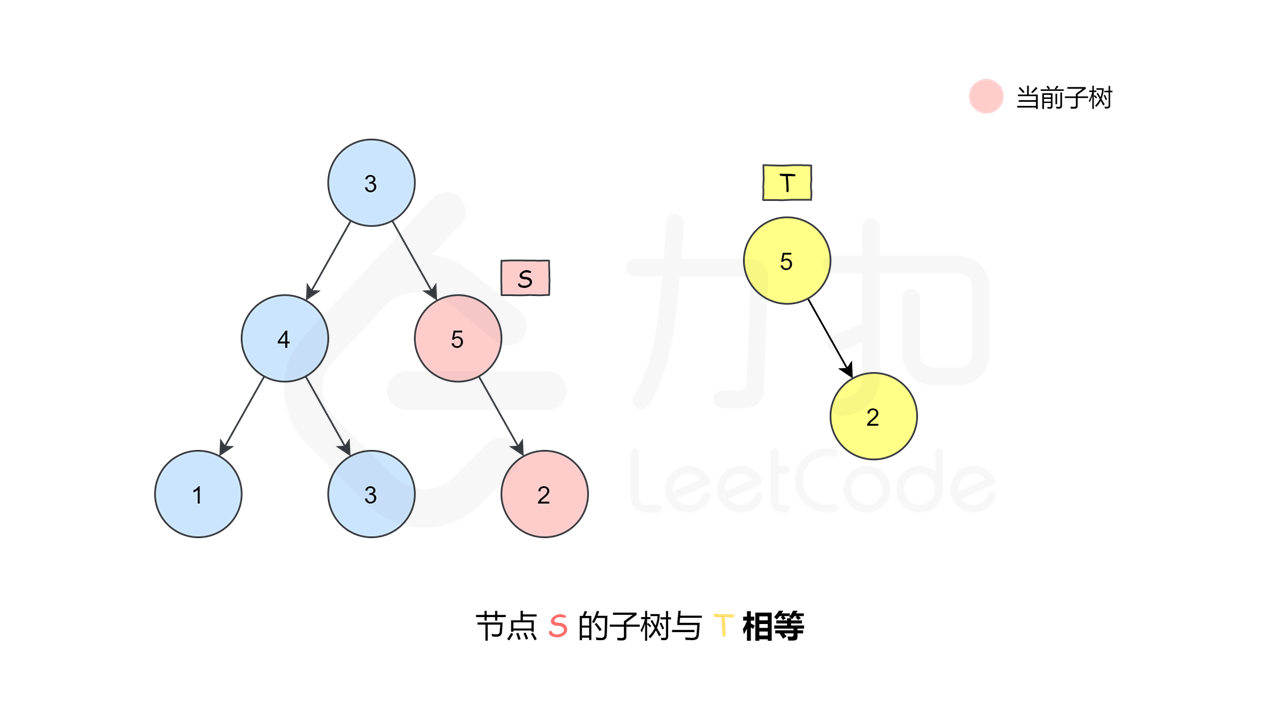
**输入:** root = [3,4,5,1,2], subRoot = [4,1,2]
**输出:** true
示例 2:
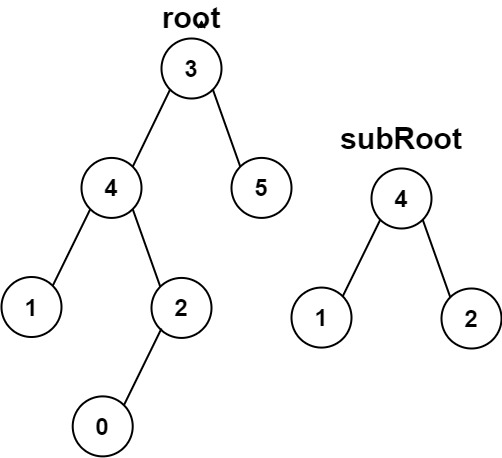
**输入:** root = [3,4,5,1,2,null,null,null,null,0], subRoot = [4,1,2]
**输出:** false
提示:
root 树上的节点数量范围是 [1, 2000]subRoot 树上的节点数量范围是 [1, 1000]-104 <= root.val <= 104-104 <= subRoot.val <= 104
📺 视频题解
📖 文字题解 方法一:深度优先搜索暴力匹配 思路和算法
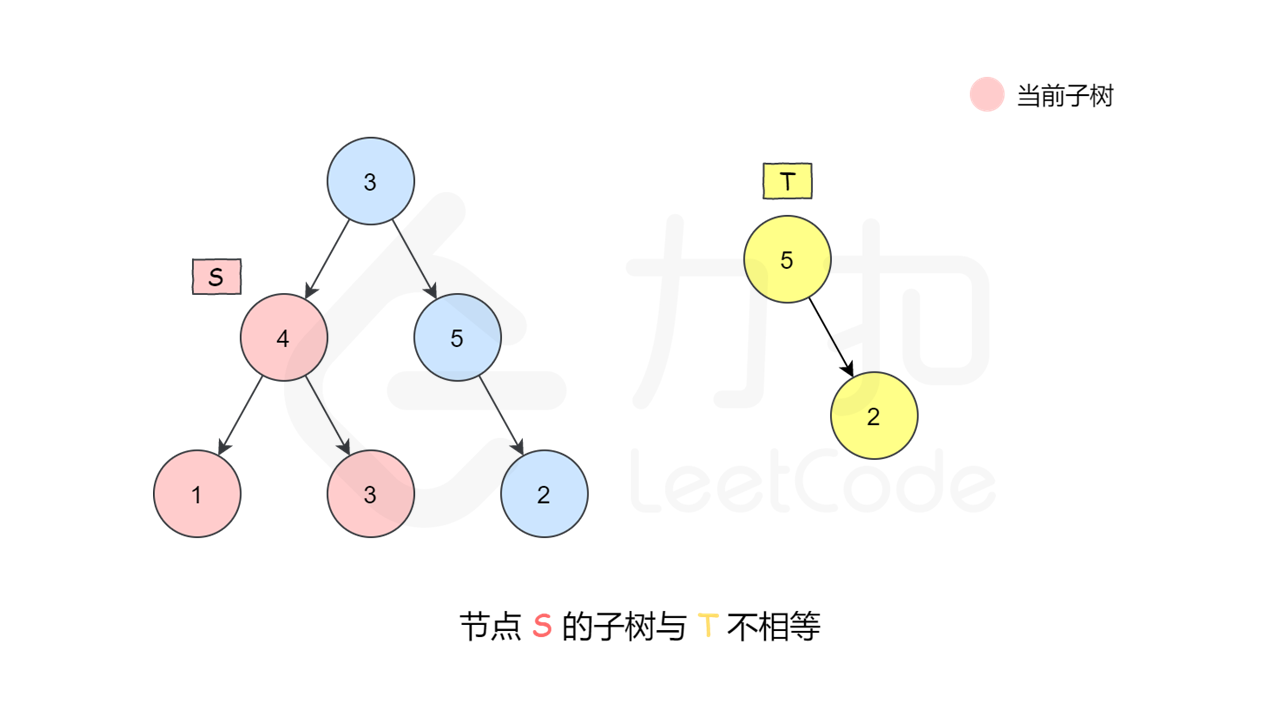
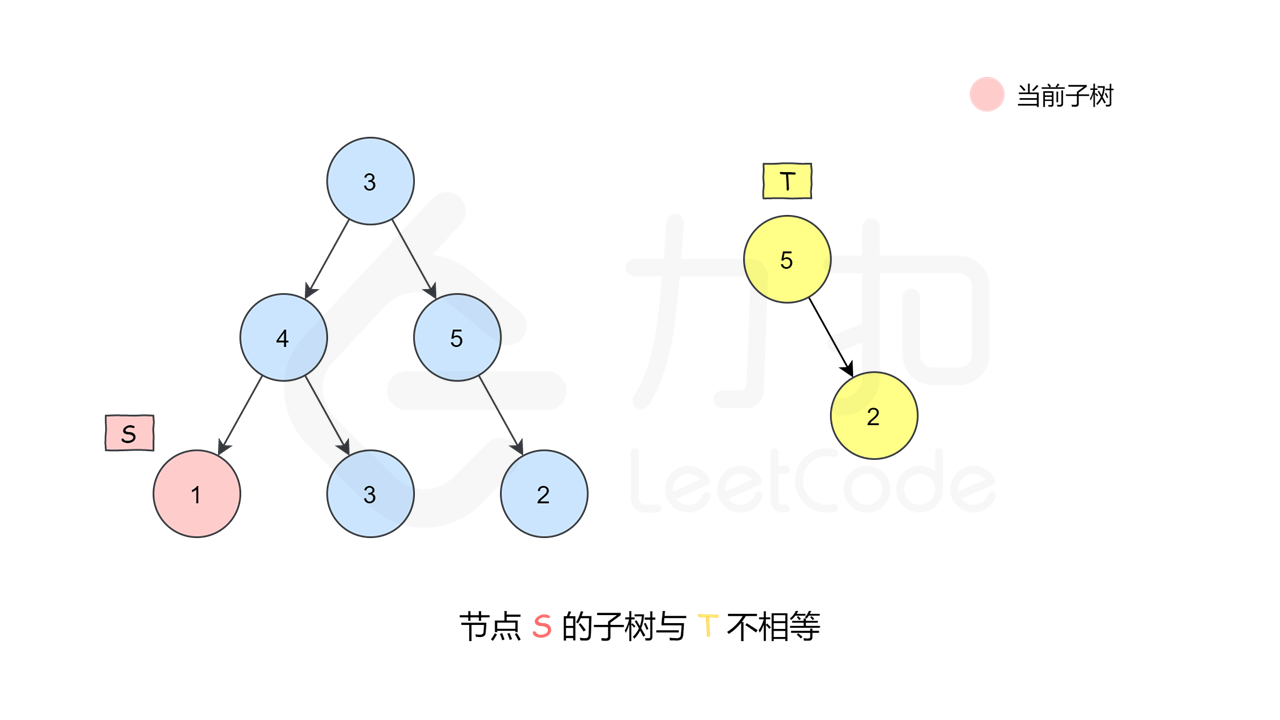
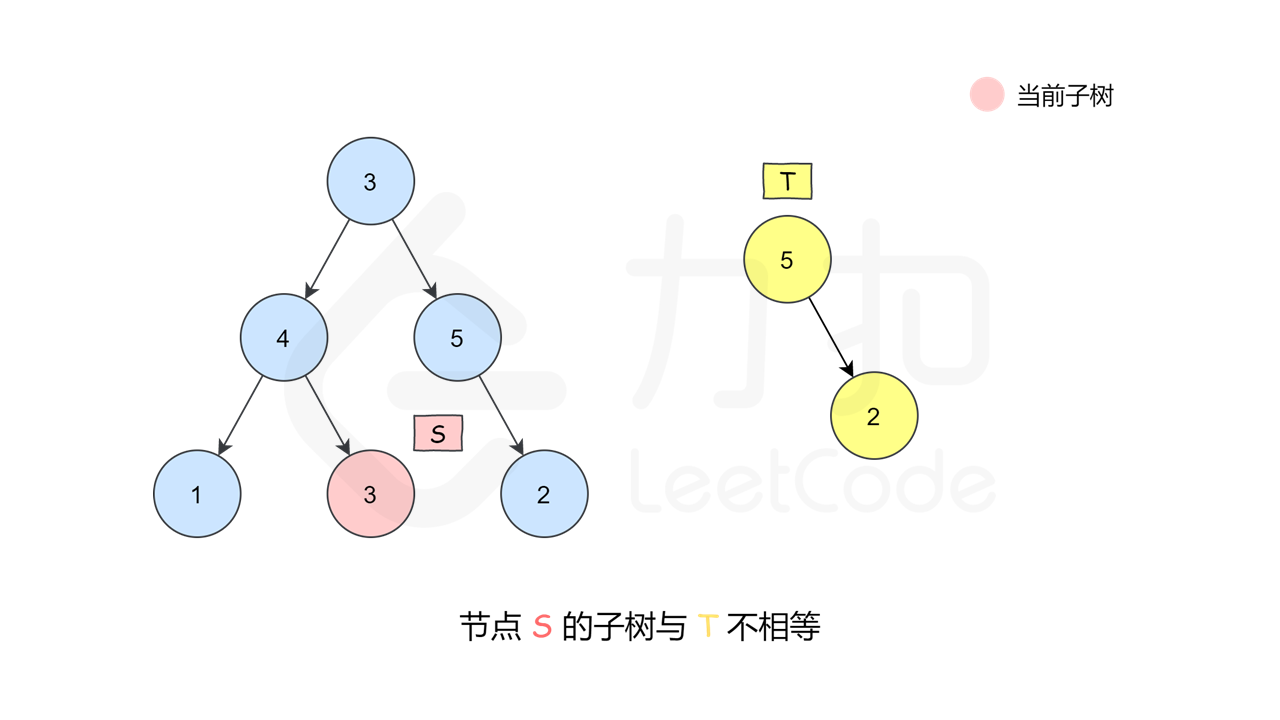
这是一种最朴素的方法——深度优先搜索枚举 s 中的每一个节点,判断这个点的子树是否和 t 相等。如何判断一个节点的子树是否和 t 相等呢,我们又需要做一次深度优先搜索来检查,即让两个指针一开始先指向该节点和 t 的根,然后「同步移动」两根指针来「同步遍历」这两棵树,判断对应位置是否相等。
<
[sol1-C++] 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 class Solution {public : bool check (TreeNode *o, TreeNode *t) if (!o && !t) { return true ; } if ((o && !t) || (!o && t) || (o->val != t->val)) { return false ; } return check (o->left, t->left) && check (o->right, t->right); } bool dfs (TreeNode *o, TreeNode *t) if (!o) { return false ; } return check (o, t) || dfs (o->left, t) || dfs (o->right, t); } bool isSubtree (TreeNode *s, TreeNode *t) return dfs (s, t); } };
[sol1-Java] 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 class Solution { public boolean isSubtree (TreeNode s, TreeNode t) { return dfs(s, t); } public boolean dfs (TreeNode s, TreeNode t) { if (s == null ) { return false ; } return check(s, t) || dfs(s.left, t) || dfs(s.right, t); } public boolean check (TreeNode s, TreeNode t) { if (s == null && t == null ) { return true ; } if (s == null || t == null || s.val != t.val) { return false ; } return check(s.left, t.left) && check(s.right, t.right); } }
[sol1-Golang] 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 func isSubtree (s *TreeNode, t *TreeNode) bool { if s == nil { return false } return check(s, t) || isSubtree(s.Left, t) || isSubtree(s.Right, t) } func check (a, b *TreeNode) bool { if a == nil && b == nil { return true } if a == nil || b == nil { return false } if a.Val == b.Val { return check(a.Left, b.Left) && check(a.Right, b.Right) } return false }
复杂度分析
时间复杂度:对于每一个 s 上的点,都需要做一次深度优先搜索来和 t 匹配,匹配一次的时间代价是 O(|t|),那么总的时间代价就是 O(|s| \times |t|)。故渐进时间复杂度为 O(|s| \times |t|)。
空间复杂度:假设 s 深度为 d_s,t 的深度为 d_t,任意时刻栈空间的最大使用代价是 O(\max { d_s, d_t })。故渐进空间复杂度为 O(\max { d_s, d_t })。
方法二:深度优先搜索序列上做串匹配 思路和算法
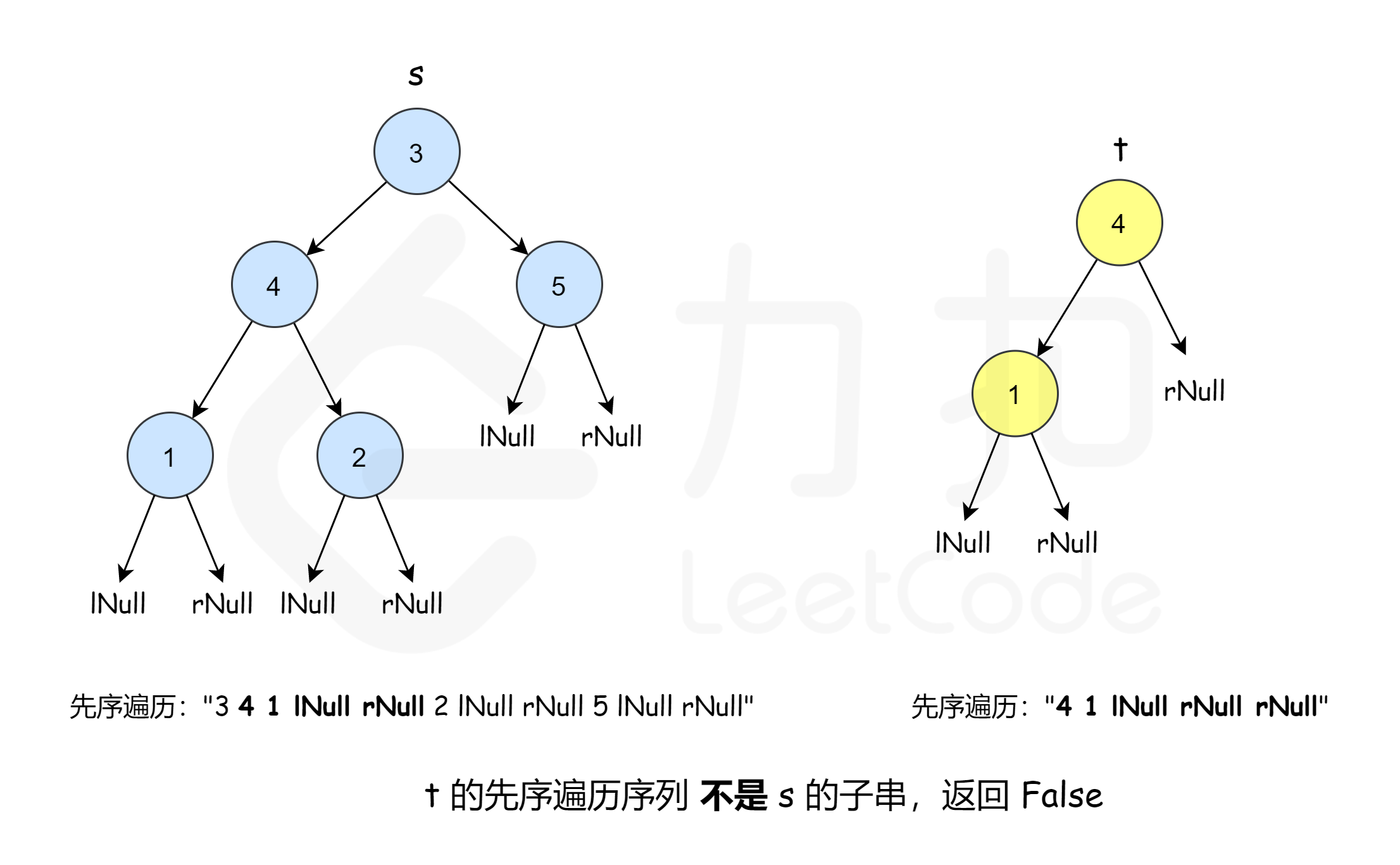
这个方法需要我们先了解一个「小套路」:一棵子树上的点在深度优先搜索序列(即先序遍历)中是连续的。了解了这个「小套路」之后,我们可以确定解决这个问题的方向就是:把 s 和 t 先转换成深度优先搜索序列,然后看 t 的深度优先搜索序列是否是 s 的深度优先搜索序列的「子串」。
这样做正确吗? 假设 s 由两个点组成,1 是根,2 是 1 的左孩子;t 也由两个点组成,1 是根,2 是 1 的右孩子。这样一来 s 和 t 的深度优先搜索序列相同,可是 t 并不是 s 的某一棵子树。由此可见「s 的深度优先搜索序列包含 t 的深度优先搜索序列」是「t 是 s 子树」的必要不充分条件 ,所以单纯这样做是不正确的。
为了解决这个问题,我们可以引入两个空值 lNull 和 rNull,当一个节点的左孩子或者右孩子为空的时候,就插入这两个空值,这样深度优先搜索序列就唯一对应一棵树。处理完之后,就可以通过判断「s 的深度优先搜索序列包含 t 的深度优先搜索序列」来判断答案。
在判断「s 的深度优先搜索序列包含 t 的深度优先搜索序列」的时候,可以暴力匹配,也可以使用 KMP 或者 Rabin-Karp 算法,在使用 Rabin-Karp 算法的时候,要注意串中可能有负值。
这里给出用 KMP 判断的代码实现。
[sol2-C++] 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 class Solution {public : vector <int > sOrder, tOrder; int maxElement, lNull, rNull; void getMaxElement (TreeNode *o) if (!o) { return ; } maxElement = max (maxElement, o->val); getMaxElement (o->left); getMaxElement (o->right); } void getDfsOrder (TreeNode *o, vector <int > &tar) if (!o) { return ; } tar.push_back (o->val); if (o->left) { getDfsOrder (o->left, tar); } else { tar.push_back (lNull); } if (o->right) { getDfsOrder (o->right, tar); } else { tar.push_back (rNull); } } bool kmp () int sLen = sOrder.size (), tLen = tOrder.size (); vector <int > fail (tOrder.size (), -1 ); for (int i = 1 , j = -1 ; i < tLen; ++i) { while (j != -1 && tOrder[i] != tOrder[j + 1 ]) { j = fail[j]; } if (tOrder[i] == tOrder[j + 1 ]) { ++j; } fail[i] = j; } for (int i = 0 , j = -1 ; i < sLen; ++i) { while (j != -1 && sOrder[i] != tOrder[j + 1 ]) { j = fail[j]; } if (sOrder[i] == tOrder[j + 1 ]) { ++j; } if (j == tLen - 1 ) { return true ; } } return false ; } bool isSubtree (TreeNode* s, TreeNode* t) maxElement = INT_MIN; getMaxElement (s); getMaxElement (t); lNull = maxElement + 1 ; rNull = maxElement + 2 ; getDfsOrder (s, sOrder); getDfsOrder (t, tOrder); return kmp (); } };
[sol2-Java] 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 class Solution { List<Integer> sOrder = new ArrayList <Integer>(); List<Integer> tOrder = new ArrayList <Integer>(); int maxElement, lNull, rNull; public boolean isSubtree (TreeNode s, TreeNode t) { maxElement = Integer.MIN_VALUE; getMaxElement(s); getMaxElement(t); lNull = maxElement + 1 ; rNull = maxElement + 2 ; getDfsOrder(s, sOrder); getDfsOrder(t, tOrder); return kmp(); } public void getMaxElement (TreeNode t) { if (t == null ) { return ; } maxElement = Math.max(maxElement, t.val); getMaxElement(t.left); getMaxElement(t.right); } public void getDfsOrder (TreeNode t, List<Integer> tar) { if (t == null ) { return ; } tar.add(t.val); if (t.left != null ) { getDfsOrder(t.left, tar); } else { tar.add(lNull); } if (t.right != null ) { getDfsOrder(t.right, tar); } else { tar.add(rNull); } } public boolean kmp () { int sLen = sOrder.size(), tLen = tOrder.size(); int [] fail = new int [tOrder.size()]; Arrays.fill(fail, -1 ); for (int i = 1 , j = -1 ; i < tLen; ++i) { while (j != -1 && !(tOrder.get(i).equals(tOrder.get(j + 1 )))) { j = fail[j]; } if (tOrder.get(i).equals(tOrder.get(j + 1 ))) { ++j; } fail[i] = j; } for (int i = 0 , j = -1 ; i < sLen; ++i) { while (j != -1 && !(sOrder.get(i).equals(tOrder.get(j + 1 )))) { j = fail[j]; } if (sOrder.get(i).equals(tOrder.get(j + 1 ))) { ++j; } if (j == tLen - 1 ) { return true ; } } return false ; } }
[sol2-Golang] 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 func isSubtree (s *TreeNode, t *TreeNode) bool { maxEle := math.MinInt32 getMaxElement(s, &maxEle) getMaxElement(t, &maxEle) lNull := maxEle + 1 ; rNull := maxEle + 2 ; sl, tl := getDfsOrder(s, []int {}, lNull, rNull), getDfsOrder(t, []int {}, lNull, rNull) return kmp(sl, tl) } func kmp (s, t []int ) bool { sLen, tLen := len (s), len (t) fail := make ([]int , sLen) for i := 0 ; i < sLen; i++ { fail[i] = -1 } for i, j := 1 , -1 ; i < tLen; i++ { for j != -1 && t[i] != t[j+1 ] { j = fail[j] } if t[i] == t[j+1 ] { j++ } fail[i] = j } for i, j := 0 , -1 ; i < sLen; i++ { for j != -1 && s[i] != t[j+1 ] { j = fail[j] } if s[i] == t[j+1 ] { j++ } if j == tLen - 1 { return true } } return false } func getDfsOrder (t *TreeNode, list []int , lNull, rNull int ) int { if t == nil { return list } list = append (list, t.Val) if t.Left != nil { list = getDfsOrder(t.Left, list, lNull, rNull) } else { list = append (list, lNull) } if t.Right != nil { list = getDfsOrder(t.Right, list, lNull, rNull) } else { list = append (list, rNull) } return list } func getMaxElement (t *TreeNode, maxEle *int ) if t == nil { return } if t.Val > *maxEle { *maxEle = t.Val } getMaxElement(t.Left, maxEle) getMaxElement(t.Right, maxEle) }
复杂度分析
时间复杂度:遍历两棵树得到深度优先搜索序列的时间代价是 O(|s| + |t|),在匹配的时候,如果使用暴力匹配,时间代价为 O(|s| \times |t|),使用 KMP 或 Rabin-Karp 进行串匹配的时间代价都是 O(|s| + |t|)。由于这里的代码使用 KMP 实现的,所以渐进时间复杂度为 O(|s| + |t|)。
空间复杂度:这里保存了两个深度优先搜索序列,还计算了 |t| 长度的 fail 数组,辅助空间的总代价为 O(|s| + |t|),任意时刻栈空间的最大使用代价是 O(\max { d_s, d_t }),由于 \max { d_s, d_t } = O(|s| + |t|),故渐进空间复杂度为 O(|s| + |t|)。
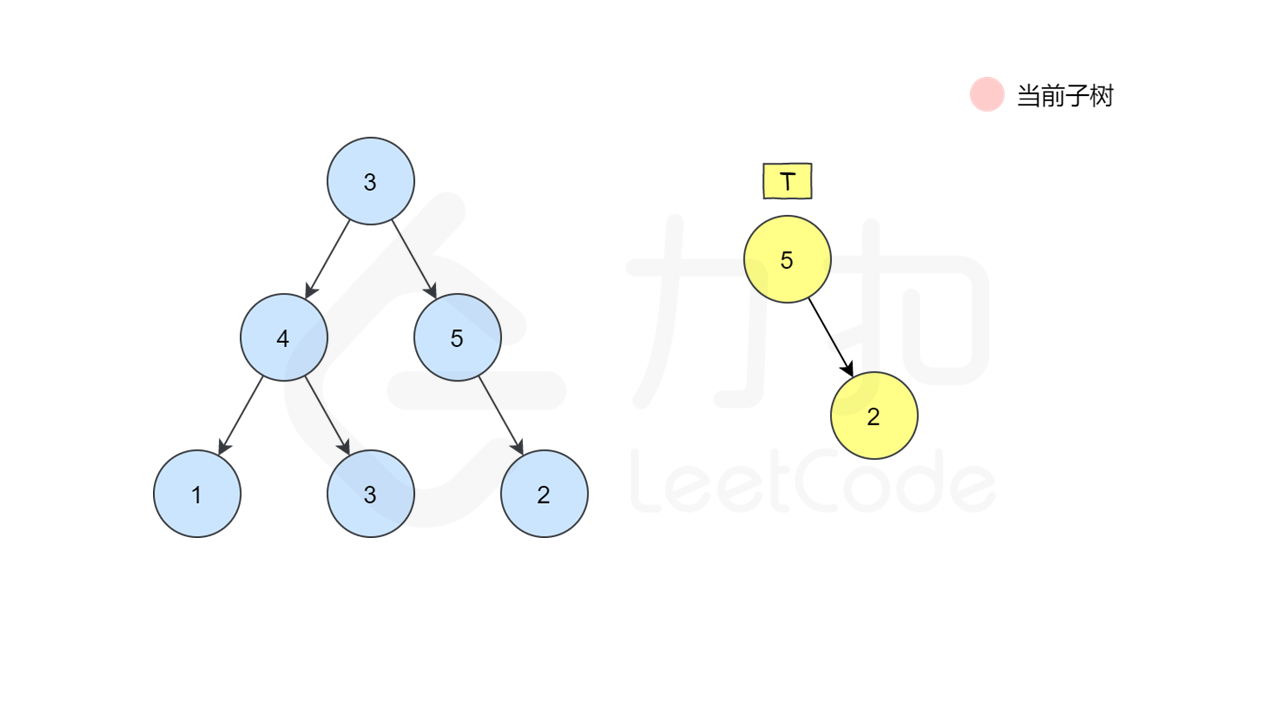
方法三:树哈希 思路和算法
考虑把每个子树都映射成一个唯一的数,如果 t 对应的数字和 s 中任意一个子树映射的数字相等,则 t 是 s 的某一棵子树。如何映射呢?我们可以定义这样的哈希函数:
f_o = v_o + 31 \cdot f_l \cdot p(s_l) + 179 \cdot f_r \cdot p(s_r)
这里 f_x 表示节点 x 的哈希值,s_x 表示节点 x 对应的子树大小,v_x 代表节点 x 的 val,p(n) 表示第 n 个素数,o 表示当前节点,l 和 r 分别表示左右孩子。这个式子的意思是:当前节点 o 的哈希值等于这个点的 val 加上 31 倍左子树的哈希值乘以第 s_l 个素数,再加上 179 倍右子树的哈希值乘以第 s_r 个素数。这里的 31 和 179 这两个数字只是为了区分左右子树,你可以自己选择你喜欢的权值。
这样做为什么可行呢? 回到我们的初衷,我们希望把每个子树都映射成一个唯一的数,这样真的能够确保唯一吗?实际上未必。但是我们在这个哈希函数中考虑到每个点的 val、子树哈希值、子树大小以及左右子树的不同权值,所以这些因素共同影响一个点的哈希值,所以出现冲突的几率较小,一般我们可以忽略。当然你也可以设计你自己的哈希函数,只要考虑到这些因素,就可以把冲突的可能性设计得比较小。可是如果还是出现了冲突怎么办呢? 我们可以设计两个哈希函数 f_1 和 f_2,用这两个哈希函数生成第三个哈希函数,比如 f = f_1 + f_2、f = f_1 \times f_2 等等,这样可以进一步缩小冲突,如果 f_1 的冲突概率是 P_1,f_2 的冲突概率是 P_2,那么 f 的冲突概率就是 P_1 \times P_2,理论上已经非常小了,这就是「双哈希」。当然,为了减少冲突,你也可以设计「三哈希」、「四哈希」等,可是这样编程的复杂度就会增加。实际上,一般情况下,只要运气不是太差,一个哈希函数就足够了。
我们可以用「埃氏筛法」或者「欧拉筛法」求出前 \arg \pi (\max { |s|, |t| }) 个素数(其中 \pi (x) 表示 x 以内素数个数,\arg \pi (x) 为它的反函数,表示有多少以内包含 x 个素数,这个映射是不唯一的,我们取最小值),然后深度优先搜索计算哈希值,最后比较 s 的所有子树是否有和 t 相同的哈希值即可。
[sol3-C++] 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 class Solution {public : static constexpr int MAX_N = 1000 + 5 ; static constexpr int MOD = int (1E9 ) + 7 ; bool vis[MAX_N]; int p[MAX_N], tot; void getPrime () vis[0 ] = vis[1 ] = 1 ; tot = 0 ; for (int i = 2 ; i < MAX_N; ++i) { if (!vis[i]) p[++tot] = i; for (int j = 1 ; j <= tot && i * p[j] < MAX_N; ++j) { vis[i * p[j]] = 1 ; if (i % p[j] == 0 ) break ; } } } struct Status { int f, s; Status (int f_ = 0 , int s_ = 0 ) : f (f_), s (s_) {} }; unordered_map <TreeNode *, Status> hS, hT; void dfs (TreeNode *o, unordered_map <TreeNode *, Status> &h) h[o] = Status (o->val, 1 ); if (!o->left && !o->right) return ; if (o->left) { dfs (o->left, h); h[o].s += h[o->left].s; h[o].f = (h[o].f + (31LL * h[o->left].f * p[h[o->left].s]) % MOD) % MOD; } if (o->right) { dfs (o->right, h); h[o].s += h[o->right].s; h[o].f = (h[o].f + (179LL * h[o->right].f * p[h[o->right].s]) % MOD) % MOD; } } bool isSubtree (TreeNode* s, TreeNode* t) getPrime (); dfs (s, hS); dfs (t, hT); int tHash = hT[t].f; for (const auto &[k, v]: hS) { if (v.f == tHash) { return true ; } } return false ; } };
[sol3-Java] 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 class Solution { static final int MAX_N = 1005 ; static final int MOD = 1000000007 ; boolean [] vis = new boolean [MAX_N]; int [] p = new int [MAX_N]; int tot; Map<TreeNode, int []> hS = new HashMap <TreeNode, int []>(); Map<TreeNode, int []> hT = new HashMap <TreeNode, int []>(); public boolean isSubtree (TreeNode s, TreeNode t) { getPrime(); dfs(s, hS); dfs(t, hT); int tHash = hT.get(t)[0 ]; for (Map.Entry<TreeNode, int []> entry : hS.entrySet()) { if (entry.getValue()[0 ] == tHash) { return true ; } } return false ; } public void getPrime () { vis[0 ] = vis[1 ] = true ; tot = 0 ; for (int i = 2 ; i < MAX_N; ++i) { if (!vis[i]) { p[++tot] = i; } for (int j = 1 ; j <= tot && i * p[j] < MAX_N; ++j) { vis[i * p[j]] = true ; if (i % p[j] == 0 ) { break ; } } } } public void dfs (TreeNode o, Map<TreeNode, int []> h) { h.put(o, new int []{o.val, 1 }); if (o.left == null && o.right == null ) { return ; } if (o.left != null ) { dfs(o.left, h); int [] val = h.get(o); val[1 ] += h.get(o.left)[1 ]; val[0 ] = (int ) ((val[0 ] + (31L * h.get(o.left)[0 ] * p[h.get(o.left)[1 ]]) % MOD) % MOD); } if (o.right != null ) { dfs(o.right, h); int [] val = h.get(o); val[1 ] += h.get(o.right)[1 ]; val[0 ] = (int ) ((val[0 ] + (179L * h.get(o.right)[0 ] * p[h.get(o.right)[1 ]]) % MOD) % MOD); } } }
复杂度分析
时间复杂度:筛选素数(此处为欧拉筛)的时间代价是 O(\arg \pi (\max { |s|, |t| })),对于 10^6 以下的 x,一般有 \arg \pi (x) < 15 x,也就是在 15 x 个自然数里一定能找到 x 个素数,所以这里可以认为它比线性稍微慢一点。深度优先搜索求解和循环比较的时间代价是 O(|s| + |t|)。故渐进时间复杂度为 O(\arg \pi (\max { |s|, |t| }) + |s| + |t|) = O(\arg \pi (\max { |s|, |t| }))。
空间复杂度:这里用了哈希表来记录每个点的哈希值和子树大小,空间代价是 O(|s| + |t|),筛选素数的 vis 数组的空间代价为 O(\arg \pi (\max { |s|, |t| })),任意时刻栈空间的最大使用代价是 O(\max { d_s, d_t }),故渐进空间复杂度为 O(\arg \pi (\max { |s|, |t| }))。

 ,
, ,
, ,
, ,
, ,
, >
>