1368-使网格图至少有一条有效路径的最小代价
给你一个 m x n 的网格图 grid 。 grid 中每个格子都有一个数字,对应着从该格子出发下一步走的方向。 grid[i][j]
中的数字可能为以下几种情况:
- 1 ,下一步往右走,也就是你会从
grid[i][j]走到grid[i][j + 1] - 2 ,下一步往左走,也就是你会从
grid[i][j]走到grid[i][j - 1] - 3 ,下一步往下走,也就是你会从
grid[i][j]走到grid[i + 1][j] - 4 ,下一步往上走,也就是你会从
grid[i][j]走到grid[i - 1][j]
注意网格图中可能会有 无效数字 ,因为它们可能指向 grid 以外的区域。
一开始,你会从最左上角的格子 (0,0) 出发。我们定义一条 有效路径 为从格子 (0,0)
出发,每一步都顺着数字对应方向走,最终在最右下角的格子 (m - 1, n - 1) 结束的路径。有效路径 不需要是最短路径 。
你可以花费 cost = 1 的代价修改一个格子中的数字,但每个格子中的数字 只能修改一次 。
请你返回让网格图至少有一条有效路径的最小代价。
示例 1:

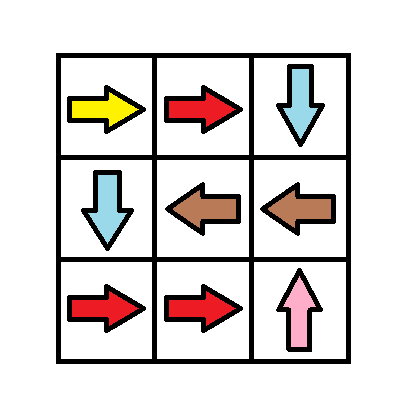
**输入:** grid = [[1,1,1,1],[2,2,2,2],[1,1,1,1],[2,2,2,2]]
**输出:** 3
**解释:** 你将从点 (0, 0) 出发。
到达 (3, 3) 的路径为: (0, 0) --> (0, 1) --> (0, 2) --> (0, 3) 花费代价 cost = 1 使方向向下 --> (1, 3) --> (1, 2) --> (1, 1) --> (1, 0) 花费代价 cost = 1 使方向向下 --> (2, 0) --> (2, 1) --> (2, 2) --> (2, 3) 花费代价 cost = 1 使方向向下 --> (3, 3)
总花费为 cost = 3.
示例 2:
**输入:** grid = [[1,1,3],[3,2,2],[1,1,4]]
**输出:** 0
**解释:** 不修改任何数字你就可以从 (0, 0) 到达 (2, 2) 。
示例 3:
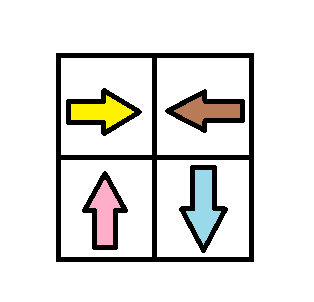
**输入:** grid = [[1,2],[4,3]]
**输出:** 1
示例 4:
**输入:** grid = [[2,2,2],[2,2,2]]
**输出:** 3
示例 5:
**输入:** grid = [[4]]
**输出:** 0
提示:
m == grid.lengthn == grid[i].length1 <= m, n <= 100
分析
如果没有「每个格子中的数字只能修改一次」这个条件,我们可以很轻松地将本题建模成一个求最短路径的问题:
我们希望求出从左上角 (0, 0) 到右下角 (m - 1, n - 1) 的「最小代价」;
当我们在任意位置 (i, j) 时,我们都可以向上、下、左、右移动一个位置,但不能走出边界。如果移动的位置与 (i, j) 处的箭头方向一致,那么移动的代价为 0,否则为 1;
这样以来,我们可以将数组 grid 建模成一个包含 mn 个节点和不超过 4mn 条边的有向图 G。图 G 中的每一个节点表示数组 grid 中的一个位置,它会向不超过 4 个相邻的节点各连出一条边,边的权值要么为 0(移动方向与箭头方向一致),要么为 1(移动方向与箭头方向不一致);
我们在图 G 上使用任意一种最短路算法,求出从 (0, 0) 到 (m - 1, n - 1) 的最短路,即可得到答案。
那么在加上了这个条件之后,这样的建模方式还是可行的吗?我们可以发现,一定存在一条最短路径,它只经过每个位置最多一次,这是因为如果一条最短路径能表示成如下的形式:
P_0, P_1, \cdots, P_k, P_{k_{11} }, \cdots, P_{k_{1x} }, P_k, P_{k_{21} }, \cdots, P_{k_{2y} }
其中 P_i 表示某个位置。该路径经过了位置 P_k 两次,那么我们可以删去这两次 P_k 之间的所有位置以及任意一次 P_k,得到一条新的最短路径:
P_0, P_1, \cdots, P_k, P_{k_{21} }, \cdots, P_{k_{2y} }
这条最短路径只经过了位置 P_k 一次。用同样的方法,我们可以继续删去最短路径中出现超过一次的位置,最终得到一条只经过每个位置最多一次的最短路径。对于这条路径,无论有没有「每个格子中的数字只能修改一次」这个条件,它都不会受到影响,因此我们仍然可以使用上述的建模方式,求出最短路并作为最终答案。
方法一:Dijkstra 算法
Dijkstra 算法适合用来求出无负权边图中的单源最短路径。其中「无负权边」表示图中所有边的权值必须为非负数,「单源最短路径」表示 Dijkstra 算法可以求出从某一个节点到其余所有节点的最短路径。由于我们的建模中,所有边的权值均为 0 或 1,并且我们只需要求出从 (0, 0) 到 (m - 1, n - 1) 的最短路,因此我们可以直接套用 Dijkstra 算法得到答案。
Dijkstra 算法本身的实现不是这篇题解的重点,如果读者不了解该算法,可以使用搜索引擎自行学习。下面的代码实现的是使用优先队列优化的 Dijsktra 算法。
1 | using PII = pair<int, int>; |
1 | class Solution: |
复杂度分析
时间复杂度:O(MN \log (MN))。优先队列优化的 Dijsktra 算法的时间复杂度为 O((M + N)\log M),其中 N 和 M 分别是图中的点数和边数。在我们的建模中,点的数量为 MN,边的数量不超过 4MN 但与 4MN 同阶,带入即可得到时间复杂度为 O(MN \log (MN))。
空间复杂度:O(MN)。优先队列优化的 Dijkstra 算法需要用到最多 M 个元素的优先队列(堆)以及若干长度为 N 表示状态的数组。带入我们建模中的点数和边数,即可得到空间复杂度为 O(MN)。
说明
除了 Dijkstra 算法以外,常用的最短路算法还有:
Floyd 算法:在 O(N^3) 的时间内计算图中任意两个节点之间的最短路,对图中的边权没有要求;
Bellman-Ford 算法:在 O(MN) 的时间内计算单源最短路,对图中的边权没有要求。
其中 N 和 M 分别是图中的点数和边数。此外还有一种 SPFA 算法,它在 Bellman-Ford 算法的基础上使用队列优化,使得在随机图上可以达到平均 O(M) 的时间复杂度(论文中只有测试结果,无证明)。但需要指出的是,在最坏情况下,SPFA 算法的时间复杂度仍为 O(MN)。如果图中的边权均为非负整数,那么 Dijkstra 算法在最坏情况下的时间复杂度 O((M + N) \log M) 是远远优于 SPFA 算法的。因此我们不能错误地认为 SPFA 算法是一种在任何情况下都高效的算法。如果可以使用 Dijkstra 算法,就尽量不要使用 SPFA 算法。
方法二:0-1 广度优先搜索
常规的广度优先搜索可以找出在边权均为 1 时的单源最短路,然而在我们的建模中,边权除了 1 之外也可能为 0。我们是否可以修改广度优先搜索的算法框架,使得它可以找出在边权为 0 或 1 时的单源最短路呢?
答案是可以的。这种修改过的广度优先搜索被称为「0-1 广度优先搜索」,这里 有一篇很详细的教程。
保证广度优先搜索正确性的基础在于:对于源点 s 以及任意两个节点 u 和 v,如果 dist}(s, u) < \textit{dist}(s, v)(其中 dist}(x, y) 表示从节点 x 到节点 y 的最短路长度),那么节点 u 一定会比节点 v 先被取出队列。在常规的广度优先搜索中,我们使用队列作为维护节点的数据结构,就保证了从队列中取出的节点,它们与源点之间的距离是单调递增的。然而如果边权可能为 0,就会出现如下的情况:
源点 s 被取出队列;
源点 s 到节点 v_1 有一条权值为 1 的边,将节点 v_1 加入队列;
源点 s 到节点 v_2 有一条权值为 0 的边,将节点 v_2 加入队列;
此时节点 v_2 一定会在节点 v_1 之后被取出队列,但节点 v_2 与源点之间的距离反而较小,这样就破坏了广度优先搜索正确性的基础。
那么我们如何修改广度优先搜索的算法框架呢?我们可以使用双端队列(double-ended queue, deque)代替普通的队列作为维护节点的数据结构。当任一节点 u 被取出队列时,如果它到某节点 v_i 有一条权值为 0 的边,那么就将节点 v_i 加入双端队列的「队首」。如果它到某节点 v_j 有一条权值为 1 的边,那么和常规的广度优先搜索相同,我们将节点 v_j 加入双端队列的「队尾」。这样以来,我们保证了任意时刻从队首到队尾的所有节点,它们与源点之间的距离是单调递增的,即从队列中取出的节点与源点之间的距离同样是单调递增的。
0-1 广度优先搜索的实现其实与 Dijkstra 算法非常相似。在 Dijkstra 算法中,我们用优先队列保证了距离的单调递增性。而在 0-1 广度优先搜索中,实际上任意时刻队列中的节点与源点的距离均为 d 或 d + 1(其中 d 为某一非负整数),并且所有与源点距离为 d 的节点都出现在队首附近,所有与源点距离为 d + 1 的节点都出现在队尾附近。因此,我们只要使用双端队列,对于边权为 0 和 1 的两种情况分别将对应节点添加至队首和队尾,就保证了距离的单调递增性。
1 | using PII = pair<int, int>; |
1 | class Solution: |
复杂度分析
时间复杂度:O(MN)。在常规的广度优先搜索中,每个节点最多被添加进队列一次,而在 0-1 广度优先搜索中,每个节点最多被添加进双端队列两次(即队首一次,队尾一次)。
空间复杂度:O(MN),与常规的广度优先搜索一致。