1463-摘樱桃 II
给你一个 rows x cols 的矩阵 grid 来表示一块樱桃地。 grid 中每个格子的数字表示你能获得的樱桃数目。
你有两个机器人帮你收集樱桃,机器人 1 从左上角格子 (0,0) 出发,机器人 2 从右上角格子 (0, cols-1) 出发。
请你按照如下规则,返回两个机器人能收集的最多樱桃数目:
- 从格子
(i,j)出发,机器人可以移动到格子(i+1, j-1),(i+1, j)或者(i+1, j+1)。 - 当一个机器人经过某个格子时,它会把该格子内所有的樱桃都摘走,然后这个位置会变成空格子,即没有樱桃的格子。
- 当两个机器人同时到达同一个格子时,它们中只有一个可以摘到樱桃。
- 两个机器人在任意时刻都不能移动到
grid外面。 - 两个机器人最后都要到达
grid最底下一行。
示例 1:
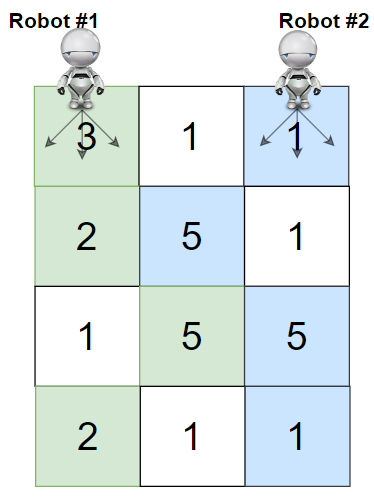
**输入:** grid = [[3,1,1],[2,5,1],[1,5,5],[2,1,1]]
**输出:** 24
**解释:** 机器人 1 和机器人 2 的路径在上图中分别用绿色和蓝色表示。
机器人 1 摘的樱桃数目为 (3 + 2 + 5 + 2) = 12 。
机器人 2 摘的樱桃数目为 (1 + 5 + 5 + 1) = 12 。
樱桃总数为: 12 + 12 = 24 。
示例 2:
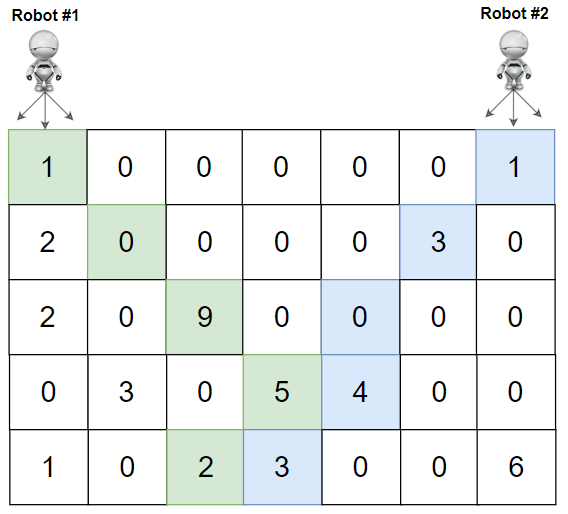
**输入:** grid = [[1,0,0,0,0,0,1],[2,0,0,0,0,3,0],[2,0,9,0,0,0,0],[0,3,0,5,4,0,0],[1,0,2,3,0,0,6]]
**输出:** 28
**解释:** 机器人 1 和机器人 2 的路径在上图中分别用绿色和蓝色表示。
机器人 1 摘的樱桃数目为 (1 + 9 + 5 + 2) = 17 。
机器人 2 摘的樱桃数目为 (1 + 3 + 4 + 3) = 11 。
樱桃总数为: 17 + 11 = 28 。
示例 3:
**输入:** grid = [[1,0,0,3],[0,0,0,3],[0,0,3,3],[9,0,3,3]]
**输出:** 22
示例 4:
**输入:** grid = [[1,1],[1,1]]
**输出:** 4
提示:
rows == grid.lengthcols == grid[i].length2 <= rows, cols <= 700 <= grid[i][j] <= 100
方法一:动态规划
思路与算法
设矩阵的长度为 m,宽度为 n,我们用 f[i][j_1][j_2] 表示当第一个机器人从 (0, 0) 走到 (i, j_1),第二个机器人从 (0, n-1) 走到 (i, j_2),最多能收集的樱桃数目。
在进行状态转移时,我们可以枚举这两个机器人在第 i-1 行的位置 dj}_1 和 dj}_2,它们满足;
\begin{aligned}
0 \leq \textit{dj}_1 < n 且 \textit{dj}_1 - j_1 \in [-1, 0, 1] \
0 \leq \textit{dj}_2 < n 且 \textit{dj}_2 - j_2 \in [-1, 0, 1]
\end{aligned}
也就是说,我们只需要在 [j_1-1, j_1, j_1+1] 中枚举 dj}_1,并且需要判断其是否在 [0, n) 的范围内。对于 dj}_2 也是如此。因此我们可以写出如下的状态转移方程;
f[i][j_1][j_2] = \max(f[i-1][\textit{dj}_1][\textit{dj}_2] + \text{value}(i, j_1, j_2))
其中 value}(i, j_1, j_2) 表示两个机器人分别在 (i, j_1) 和 (i, j_2) 时可以收集的樱桃数目总和。根据题目描述,有:
\text{value}(i, j_1, j_2) =
\begin{cases}
\text{grid}[i][j_1] + \text{grid}[i][j_2] & 如果j_1 \neq j_2 \j_1 = j_2
\text{grid}[i][j_1] & 如果
\end{cases}
动态规划的边界条件为
f[i][0][n-1] = \text{grid}[0][0] + \text{grid}[0][n-1]
即两个机器人初始所在的位置。最终的答案即为所有 f[m-1][j_1][j_2] 中的最大值。
细节
动态规划一般有自顶向下和自底向上两种编写方式,其中自顶向下也被称为「记忆化搜索」。
如果我们用自顶向下的方式来编写代码,那么代码将会十分简洁,并且不需要考虑很多特殊情况和边界条件,这是因为「记忆化搜索」只会「搜索」可行的状态;
如果我们用自底向上的方式来编写代码,那么就需要考虑特殊情况和边界条件。例如在 i=0 时,除了 f[0][0][n-1] 之外的其余状态都是不合法的。对于这些状态,我们可以将其标记为 -1,并在状态转移时进行特殊判断。并且,我们可以发现在状态转移方程中,f[i][..][..] 只会从 f[i-1][..][..] 转移而来,因此我们可以使用两个二维数组代替三位数组,交替地进行状态转移,使空间复杂度得到优化。
下面的 C++ 和 Java 代码给出了自底向上 + 空间优化的参考;Python 代码给出了自顶向下的参考。
1 | class Solution { |
1 | class Solution { |
1 | class Solution: |
复杂度分析
时间复杂度:O(mn^2)。动态规划中的状态有 mn^2 个,对于每个状态,我们会从最多 3*3=9 个前置状态中选择一个进行转移。
空间复杂度:O(mn^2) 或 O(n^2),取决于是否使用了空间优化。