1937-扣分后的最大得分
给你一个 m x n 的整数矩阵 points (下标从 0 开始)。一开始你的得分为 0 ,你想最大化从矩阵中得到的分数。
你的得分方式为: 每一行 中选取一个格子,选中坐标为 (r, c) 的格子会给你的总得分 增加 points[r][c] 。
然而,相邻行之间被选中的格子如果隔得太远,你会失去一些得分。对于相邻行 r 和 r + 1 (其中 0 <= r < m - 1),选中坐标为(r, c1) 和 (r + 1, c2) 的格子,你的总得分 减少 abs(c1 - c2) 。
请你返回你能得到的 最大 得分。
abs(x) 定义为:
- 如果
x >= 0,那么值为x。 - 如果
x < 0,那么值为-x。
示例 1:
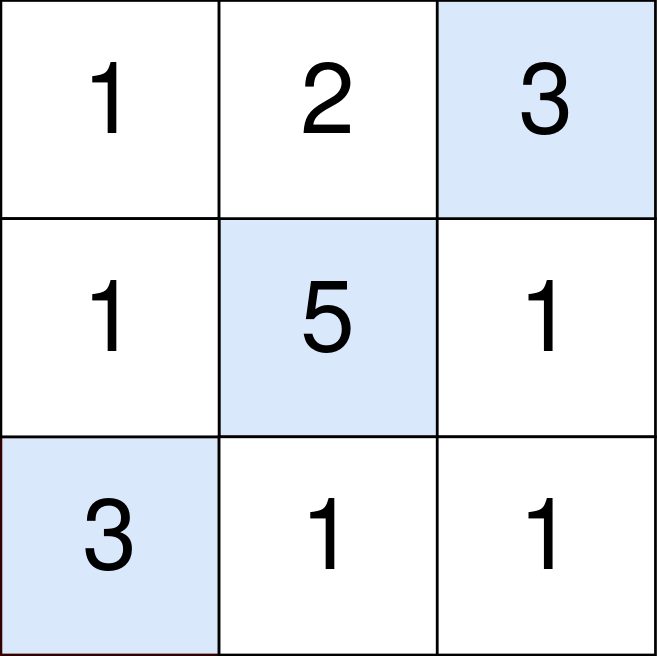
**输入:** points = [[1,2,3],[1,5,1],[3,1,1]]
**输出:** 9
**解释:**
蓝色格子是最优方案选中的格子,坐标分别为 (0, 2),(1, 1) 和 (2, 0) 。
你的总得分增加 3 + 5 + 3 = 11 。
但是你的总得分需要扣除 abs(2 - 1) + abs(1 - 0) = 2 。
你的最终得分为 11 - 2 = 9 。
示例 2:
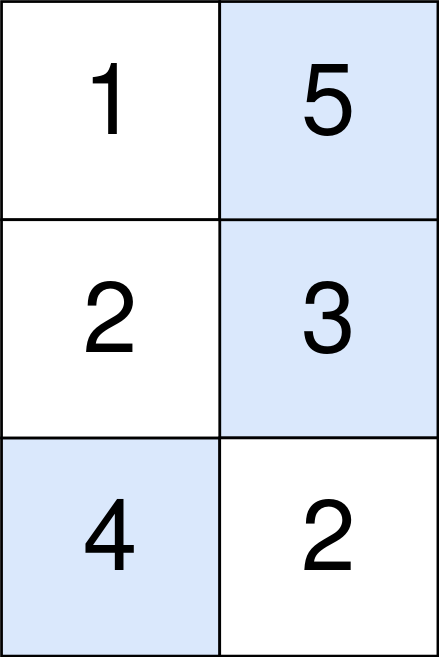
**输入:** points = [[1,5],[2,3],[4,2]]
**输出:** 11
**解释:**
蓝色格子是最优方案选中的格子,坐标分别为 (0, 1),(1, 1) 和 (2, 0) 。
你的总得分增加 5 + 3 + 4 = 12 。
但是你的总得分需要扣除 abs(1 - 1) + abs(1 - 0) = 1 。
你的最终得分为 12 - 1 = 11 。
提示:
m == points.lengthn == points[r].length1 <= m, n <= 1051 <= m * n <= 1050 <= points[r][c] <= 105
方法一:动态规划
思路与算法
记 f[i][j] 表示当我们在第 0, 1, \cdots, i 行均选择了一个格子,并且第 i 行选择的格子为 (i, j) 时的最大分数。在进行状态转移时,我们可以枚举第 i-1 行选择的格子 j’,这样就可以得到状态转移方程:
f[i][j] = \max \big{ f[i-1][j’] - |j - j’| \big} + \textit{points}[i][j]
最终的答案即为 f[m-1][0..n-1] 中的最大值。
然而上述动态规划的时间复杂度为 O(mn^2),因为总计有 mn 个状态,而对于每个状态我们需要 O(n) 的时间枚举 j’ 进行转移,这样很容易超出时间限制,因此我们需要进行优化。
优化
优化的重点在于状态转移方程中的 |j-j’| 这一项。
当 j’ \leq j 时,|j - j’| = j - j’,状态转移方程变为:
\begin{aligned}
f[i][j] &= \max \big{ f[i-1][j’] - j + j’ \big} + \textit{points}[i][j] \
&= \max \big{ f[i-1][j’] + j’ \big} + \textit{points}[i][j] - j
\end{aligned}
这样一来,我们只需要在满足 j’ \leq j 的前提下,找出最大的 f[i-1][j’] + j’ 进行转移即可。我们只需要在 [0, n-1] 的范围内正序地遍历一遍 j,即可在 O(n) 的时间完成这一部分的状态转移。
同理,当 j’ > j 时,|j - j’| = j’ - j,状态转移方程变为:
\begin{aligned}
f[i][j] &= \max \big{ f[i-1][j’] - j’ + j \big} + \textit{points}[i][j] \
&= \max \big{ f[i-1][j’] - j’ \big} + \textit{points}[i][j] + j
\end{aligned}
这样一来,我们只需要在满足 j’ > j 的前提下,找出最大的 f[i-1][j’] - j’ 进行转移即可。我们只需要在 [0, n-1] 的范围内倒序地遍历一遍 j,即可在 O(n) 的时间完成这一部分的状态转移。
在进行了两次 O(n) 的遍历后,我们就得到了所有 f[i][0..n-1] 的值,动态规划的总时间复杂度就优化为 O(mn)。
细节
当 i=0 时,f[i-1][..] 均为不合法状态,我们需要直接计算出它们的值,即 f[0][j] = \textit{points}[0][j]。
同时我们可以发现,在状态转移方程中 f[i][..] 只会从 f[i-1][..] 转移而来,因此我们可以使用两个一维数组代替二维数组 f 进行状态转移。此时,我们可以无需特殊考虑 i=0 时所有 f[i][..] 的值。假设我们用来转移的两个数组为 t_1 和 t_2,当 i=0 时,我们使用 t_1 对 t_2 进行转移。由于 t_1 的所有元素均为初始化的 0 值,那么 t_2[j] 一定是从同下标的 t_1[j] 转移而来的(此时 |j-j’| 的值最小),因此可以得到正确的 t_2[j] = \textit{points}[0][j]。
代码
1 | class Solution { |
1 | class Solution: |
复杂度分析
时间复杂度:O(mn)。
空间复杂度:O(n)。