2087-网格图中机器人回家的最小代价
给你一个 m x n 的网格图,其中 (0, 0) 是最左上角的格子,(m - 1, n - 1) 是最右下角的格子。给你一个整数数组startPos ,startPos = [startrow, startcol] 表示 初始 有一个 机器人 在格子(startrow, startcol) 处。同时给你一个整数数组 homePos ,homePos = [homerow, homecol]
表示机器人的 家 在格子 (homerow, homecol) 处。
机器人需要回家。每一步它可以往四个方向移动: 上 , 下 , 左 , 右
,同时机器人不能移出边界。每一步移动都有一定代价。再给你两个下标从 0 开始的额整数数组:长度为 m 的数组 rowCosts
和长度为 n 的数组 colCosts 。
- 如果机器人往 上 或者往 下 移动到第
r行 的格子,那么代价为rowCosts[r]。 - 如果机器人往 左 或者往 右 移动到第
c列 的格子,那么代价为colCosts[c]。
请你返回机器人回家需要的 最小总代价 。
示例 1:
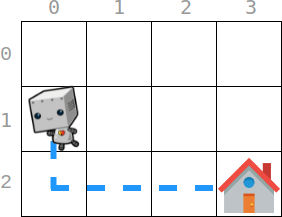
**输入:** startPos = [1, 0], homePos = [2, 3], rowCosts = [5, 4, 3], colCosts = [8, 2, 6, 7]
**输出:** 18
**解释:** 一个最优路径为:
从 (1, 0) 开始
-> 往下走到 ( _ **2**_ , 0) 。代价为 rowCosts[2] = 3 。
-> 往右走到 (2, _**1**_ ) 。代价为 colCosts[1] = 2 。
-> 往右走到 (2, _**2**_ ) 。代价为 colCosts[2] = 6 。
-> 往右走到 (2, _**3**_ ) 。代价为 colCosts[3] = 7 。
总代价为 3 + 2 + 6 + 7 = 18
示例 2:
**输入:** startPos = [0, 0], homePos = [0, 0], rowCosts = [5], colCosts = [26]
**输出:** 0
**解释:** 机器人已经在家了,所以不需要移动。总代价为 0 。
提示:
m == rowCosts.lengthn == colCosts.length1 <= m, n <= 1050 <= rowCosts[r], colCosts[c] <= 104startPos.length == 2homePos.length == 20 <= startrow, homerow < m0 <= startcol, homecol < n
方法一:贪心
提示 1
如果在某一条路径中,相邻的两步分别为横向(左/右)和纵向(上/下)移动,那么交换这两步前后,路径的总代价不变。
提示 1 解释
由于路径的其它部分不会改变,对应部分的代价也不会改变,因此我们只需要考虑交换的两步。不妨假设在这两步的过程中,机器人从 (r, c) 移动到了 (r + 1, c + 1)。
考虑交换前后两种不同的移动方式(用 \rightarrow 表示沿着某个方向一直移动,下同):
(r, c) \rightarrow (r + 1, c) \rightarrow (r + 1, c + 1):第一步移动到 r + 1 行,代价为 rowCost}[r + 1];第二步移动到 c + 1 列,代价为 colCost}[c + 1]。总代价为 rowCost}[r + 1] + \textit{colCost}[c + 1]。
(r, c) \rightarrow (r, c + 1) \rightarrow (r + 1, c + 1):第一步移动到 c + 1 列,代价为 colCost}[c + 1];第二步移动到 r + 1 行,代价为 rowCost}[r + 1]。总代价为 colCost}[c + 1] + \textit{rowCost}[r + 1]。
可以发现,这两种方式代价相同。因此,路径的总代价也不会改变。
提示 2
如果某一条路径中包含相反操作(即同时含有向左和向右的操作,或同时含有向上和向下的操作),那么这条路径的代价一定不优于将这些操作成对抵消后的路径。
除此之外,任意不包含任何相反操作的路径对应的总代价一定最小。
提示 2 解释
我们首先考虑前半部分。
不失一般性地,首先考虑从 (r, c) 到 (r + x, c) (x \ge 0) 的两种路径。一种路径为 (r, c) \rightarrow (r + x, c),另一种路径为 (r, c) \rightarrow (r, c + 1) \rightarrow (r + x, c + 1) \rightarrow (r + x, c)。计算可得,后者相对于前者多出了 colCost}[c] + \textit{colCost}[c + 1] \ge 0 的总代价,亦即前者一定更优。
而对于一般的存在相反方向操作的路径,其中必定包含上述的路径片段;而将路径片段中的相反操作抵消后,新的路径在总代价上一定不高于原路径。因此,我们可以递归地抵消这些相反操作,直至路径不包含任何相反操作,同时在每次操作时,总代价一定不会增加。
综上可知,对于任意包含相反操作的路径,一定存在一个不包含相反操作的路径,后者的总代价小于等于前者。因此,最小总代价对应的路径一定是不包含相反操作的路径。
而对于所有的这些不包含任何相反操作的路径,这些路径一定是由一些(数量可能为 0)单方向的横向操作和一些(数量可能为 0)单方向的纵向操作组成。根据 提示 1,我们可以任意交换这些操作,且总代价不变。因此,任意不包含任何相反操作的路径对应的总代价一定最小。
思路与算法
根据 提示 2,我们只需要构造任意一条从起点到家的不包含相反操作的路径,该路径对应的总代价即为最小总代价。
为了方便计算,我们先让机器人向上或向下移动至家所在行,再让机器人向左或向右移动至家所在的格子,并在这过程中计算总代价。
而对于如何确定移动的方向,我们行间的上下移动为例:我们比较机器人所在行号 r_1 与家所在行号 r_2,如果 r_1 < r_2,则我们需要向下移动;如果 r_1 > r_2,则我们需要向上移动;如果 r_1 = r_2,则我们无需移动。
最终,我们返回该总代价作为答案。
代码
1 | class Solution { |
1 | class Solution: |
复杂度分析
时间复杂度:O(m + n),其中 m 为网格图的行数,n 为网格图的列数。即为计算最小代价的时间复杂度。
空间复杂度:O(1)。