2120-执行所有后缀指令
现有一个 n x n 大小的网格,左上角单元格坐标 (0, 0) ,右下角单元格坐标 (n - 1, n - 1) 。给你整数 n
和一个整数数组 startPos ,其中 startPos = [startrow, startcol] 表示机器人最开始在坐标为(startrow, startcol) 的单元格上。
另给你一个长度为 m 、下标从 0 开始的字符串 s ,其中 s[i] 是对机器人的第 i
条指令:'L'(向左移动),'R'(向右移动),'U'(向上移动)和 'D'(向下移动)。
机器人可以从 s 中的任一第 i 条指令开始执行。它将会逐条执行指令直到 s 的末尾,但在满足下述条件之一时,机器人将会停止:
- 下一条指令将会导致机器人移动到网格外。
- 没有指令可以执行。
返回一个长度为 m 的数组 answer ,其中 answer[i] 是机器人从第 i 条指令 开始 ,可以执行的
指令数目 。
示例 1:
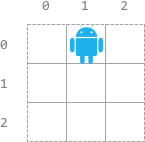
**输入:** n = 3, startPos = [0,1], s = "RRDDLU"
**输出:** [1,5,4,3,1,0]
**解释:** 机器人从 startPos 出发,并从第 i 条指令开始执行:
- 0: " _ **R**_ RDDLU" 在移动到网格外之前,只能执行一条 "R" 指令。
- 1: " _ **RDDLU**_ " 可以执行全部五条指令,机器人仍在网格内,最终到达 (0, 0) 。
- 2: " _ **DDLU**_ " 可以执行全部四条指令,机器人仍在网格内,最终到达 (0, 0) 。
- 3: " _ **DLU**_ " 可以执行全部三条指令,机器人仍在网格内,最终到达 (0, 0) 。
- 4: " _ **L**_ U" 在移动到网格外之前,只能执行一条 "L" 指令。
- 5: "U" 如果向上移动,将会移动到网格外。
示例 2:
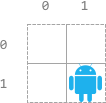
**输入:** n = 2, startPos = [1,1], s = "LURD"
**输出:** [4,1,0,0]
**解释:**
- 0: " _ **LURD**_ "
- 1: " _ **U**_ RD"
- 2: "RD"
- 3: "D"
示例 3:

**输入:** n = 1, startPos = [0,0], s = "LRUD"
**输出:** [0,0,0,0]
**解释:** 无论机器人从哪条指令开始执行,都会移动到网格外。
提示:
m == s.length1 <= n, m <= 500startPos.length == 20 <= startrow, startcol < ns由'L'、'R'、'U'和'D'组成
方法一:模拟
思路与算法
我们直接从每一条指令开始,模拟机器人的运动路径即可。具体地,从第 i 条指令开始时,我们首先讲机器人置于 startPos 的位置,随后逐条执行指令。当遇到第 j 条 L, R, U, D 指令时,机器人会分别向左、右、上、下移动一个位置。如果机器人移动到了网格外,那么它可以执行 j - i 条指令。如果在所有指令执行完毕后,机器人仍然位于网格内,那么它可以执行全部的 m - i 条指令。
代码
1 | class Solution { |
1 | class Solution: |
复杂度分析
时间复杂度:O(m^2)。
空间复杂度:O(1)。
Comments