给你一个下标从 0 开始的二维整数数组 grid ,数组大小为 m x n 。每个单元格都是两个值之一:
0 表示一个 空 单元格,1 表示一个可以移除的 障碍物 。
你可以向上、下、左、右移动,从一个空单元格移动到另一个空单元格。
现在你需要从左上角 (0, 0) 移动到右下角 (m - 1, n - 1) ,返回需要移除的障碍物的 最小 数目。
示例 1:
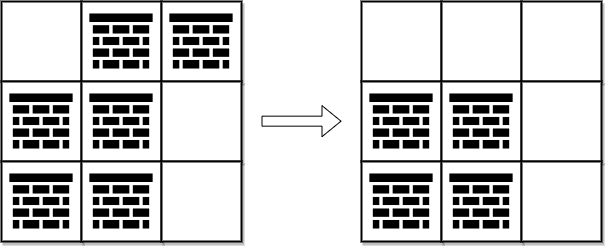
**输入:** grid = [[0,1,1],[1,1,0],[1,1,0]]
**输出:** 2
**解释:** 可以移除位于 (0, 1) 和 (0, 2) 的障碍物来创建从 (0, 0) 到 (2, 2) 的路径。
可以证明我们至少需要移除两个障碍物,所以返回 2 。
注意,可能存在其他方式来移除 2 个障碍物,创建出可行的路径。
示例 2:
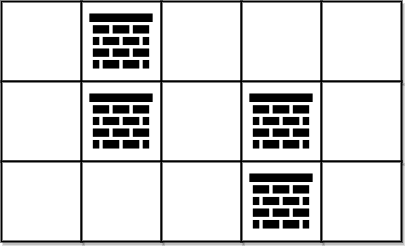
**输入:** grid = [[0,1,0,0,0],[0,1,0,1,0],[0,0,0,1,0]]
**输出:** 0
**解释:** 不移除任何障碍物就能从 (0, 0) 到 (2, 4) ,所以返回 0 。
提示:
m == grid.lengthn == grid[i].length1 <= m, n <= 1052 <= m * n <= 105grid[i][j] 为 0 或 1grid[0][0] == grid[m - 1][n - 1] == 0
本题 视频讲解 已出炉,包括 0-1 BFS 的原理 ,欢迎三连~
提示 1 把障碍物当作可以经过的单元格,经过它的代价为 1,空单元格经过的代价为 0。
提示 2 问题转化成从起点到终点的最短路。
提示 3 我们可以用 Dijkstra,但还可以用 0-1 BFS 来将时间复杂度优化至 O(mn)。
具体见 1368. 使网格图至少有一条有效路径的最小代价 官方题解的方法二,本文不再赘述。
复杂度分析
时间复杂度:O(mn)。
空间复杂度:O(mn)。
[sol1-Python3] 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 class Solution : def minimumObstacles (self, grid: List [List [int ]] ) -> int : m, n = len (grid), len (grid[0 ]) dis = [[inf] * n for _ in range (m)] dis[0 ][0 ] = 0 q = deque([(0 , 0 )]) while q: x, y = q.popleft() for nx, ny in (x + 1 , y), (x - 1 , y), (x, y + 1 ), (x, y - 1 ): if 0 <= nx < m and 0 <= ny < n: g = grid[x][y] if dis[x][y] + g < dis[nx][ny]: dis[nx][ny] = dis[x][y] + g if g == 0 : q.appendleft((nx, ny)) else : q.append((nx, ny)) return dis[m - 1 ][n - 1 ]
[sol1-Java] 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 class Solution { static final int [][] dirs = { {-1 , 0 }, {1 , 0 }, {0 , -1 }, {0 , 1 } }; public int minimumObstacles (int [][] grid) { int m = grid.length, n = grid[0 ].length; var dis = new int [m][n]; for (var i = 0 ; i < m; i++) Arrays.fill(dis[i], Integer.MAX_VALUE); dis[0 ][0 ] = 0 ; var q = new ArrayDeque <int []>(); q.addFirst(new int []{0 , 0 }); while (!q.isEmpty()) { var p = q.pollFirst(); int x = p[0 ], y = p[1 ]; for (var d : dirs) { int nx = x + d[0 ], ny = y + d[1 ]; if (0 <= nx && nx < m && 0 <= ny && ny < n) { var g = grid[nx][ny]; if (dis[x][y] + g < dis[nx][ny]) { dis[nx][ny] = dis[x][y] + g; if (g == 0 ) q.addFirst(new int []{nx, ny}); else q.addLast(new int []{nx, ny}); } } } } return dis[m - 1 ][n - 1 ]; } }
[sol1-C++] 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 class Solution { static constexpr int dirs[4 ][2 ] = { {1 , 0 }, {-1 , 0 }, {0 , 1 }, {0 , -1 } }; public : int minimumObstacles (vector<vector<int >> &grid) int m = grid.size (), n = grid[0 ].size (); int dis[m][n]; memset (dis, 0x3f , sizeof (dis)); dis[0 ][0 ] = 0 ; deque<pair<int , int >> q; q.emplace_front (0 , 0 ); while (!q.empty ()) { auto [x, y] = q.front (); q.pop_front (); for (auto &[dx, dy] : dirs) { int nx = x + dx, ny = y + dy; if (0 <= nx && nx < m && 0 <= ny && ny < n) { int g = grid[nx][ny]; if (dis[x][y] + g < dis[nx][ny]) { dis[nx][ny] = dis[x][y] + g; g == 0 ? q.emplace_front (nx, ny) : q.emplace_back (nx, ny); } } } } return dis[m - 1 ][n - 1 ]; } };
[sol1-Go] 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 type pair struct { x, y int }var dir4 = []struct { x, y int }{ {-1 , 0 }, {1 , 0 }, {0 , -1 }, {0 , 1 } }func minimumObstacles (grid [][]int ) int ) { m, n := len (grid), len (grid[0 ]) dis := make ([][]int , m) for i := range dis { dis[i] = make ([]int , n) for j := range dis[i] { dis[i][j] = m * n } } dis[0 ][0 ] = 0 q := [2 ][]pair{ { {} }} for len (q[0 ]) > 0 || len (q[1 ]) > 0 { var p pair if len (q[0 ]) > 0 { p, q[0 ] = q[0 ][len (q[0 ])-1 ], q[0 ][:len (q[0 ])-1 ] } else { p, q[1 ] = q[1 ][0 ], q[1 ][1 :] } for _, d := range dir4 { x, y := p.x+d.x, p.y+d.y if 0 <= x && x < m && 0 <= y && y < n { g := grid[x][y] if dis[p.x][p.y]+g < dis[x][y] { dis[x][y] = dis[p.x][p.y] + g q[g] = append (q[g], pair{x, y}) } } } } return dis[m-1 ][n-1 ] }